I’ve been trying to control a rather slow time constant system for temperature control and having a minimum integral gain of 0dB is somewhat frustrating. I can achieve the time response I desire by setting a low proportional gain, but then this limits the systems overall response range. For now I can manage by adjusting the offset manually through the api, but it would be nice if the PID controller offered a slow controller option like in the laser lock box.
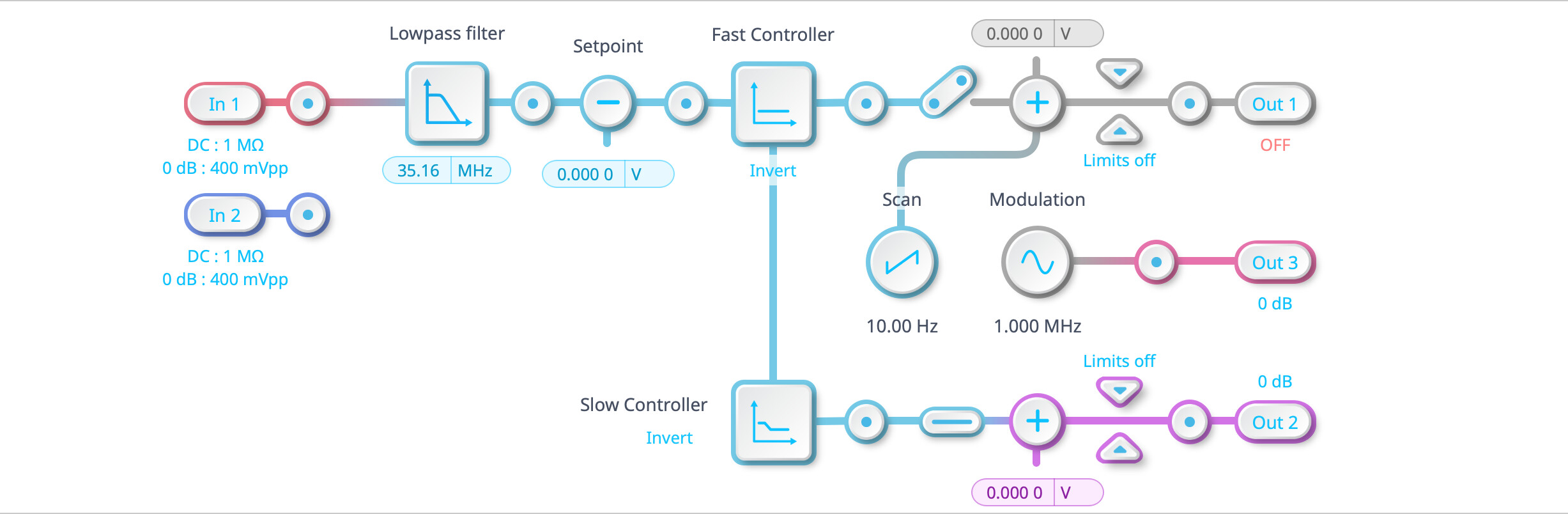
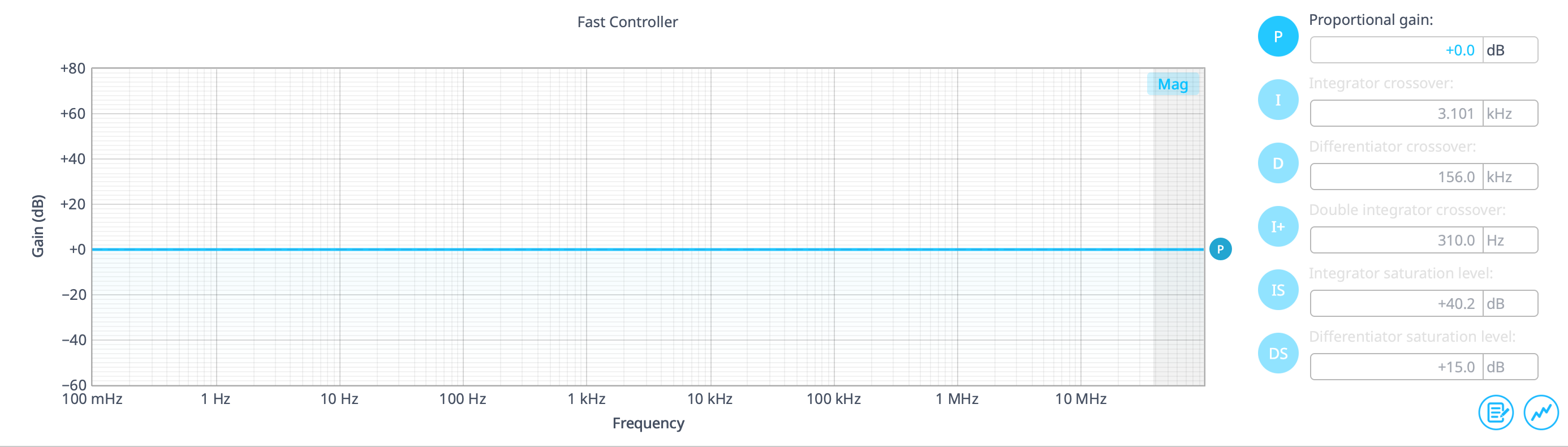
Thank you for reaching out to Liquid Instruments! I will add this as a feature request. In the mean time, you can use the Laser Lock Box as a slow PID controller by setting the demodulation source to ‘None’ and configuring the fast controller to have 0 dB proportional gain, and all other parameters disabled. At this point, the fast controller just passes the signal to the slow PID and Output 2 is the output of the slow PID. I hope this can be a helpful workaround in the mean time!
Just wanted to mention that I found an additional workaround in the PID controller that’s easier and less FPGA resource intensive than the laser lock box method.
In the advanced mode of the PID controller, if one sets the proportional gain to something negative with no other controls, then in section B, the controller has the minimum integrator gain and a positive proportional gain, you can push the frequency response down while still maintaining the full output range. For example, the below configuration works
My understanding is that the second stage defines the output behavior, so if the second stage has a low overall gain, the PID controller’s range is limited. You can make a frequency gain response that looks exactly the same by swapping the order of the stage configuration, but your final output would be -20dB.
The drawback here is that we’ve given up derivative control, but for applications like temperature controllers, this is fine.